|
retinify 0.1.7
Real-Time AI Stereo Vision Library
|
|
retinify 0.1.7
Real-Time AI Stereo Vision Library
|
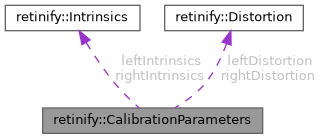
Stereo camera calibration parameters. More...
#include <geometry.hpp>
Public Member Functions | |
| auto | operator== (const CalibrationParameters &other) const noexcept -> bool |
Public Attributes | |
| PinholeIntrinsics | leftIntrinsics {} |
| Pinhole intrinsics for the left camera. | |
| DistortionCoefficients | leftDistortion {} |
| Distortion coefficients for the left camera. | |
| PinholeIntrinsics | rightIntrinsics {} |
| Pinhole intrinsics for the right camera. | |
| DistortionCoefficients | rightDistortion {} |
| Distortion coefficients for the right camera. | |
| Mat3x3d | rotation {} |
| Rotation matrix. | |
| Vec3d | translation {} |
| Translation vector. | |
| std::uint32_t | imageWidth {} |
| Image width (in pixels) | |
| std::uint32_t | imageHeight {} |
| Image height (in pixels) | |
| double | calibrationError {} |
| Root mean square reprojection error (in pixels) | |
| std::int64_t | calibrationTime {} |
| Calibration timestamp (in seconds since epoch, UTC) | |
Stereo camera calibration parameters.
|
inlinenoexcept |
| double retinify::CalibrationParameters::calibrationError {} |
Root mean square reprojection error (in pixels)
| std::int64_t retinify::CalibrationParameters::calibrationTime {} |
Calibration timestamp (in seconds since epoch, UTC)
| std::uint32_t retinify::CalibrationParameters::imageHeight {} |
Image height (in pixels)
| std::uint32_t retinify::CalibrationParameters::imageWidth {} |
Image width (in pixels)
| DistortionCoefficients retinify::CalibrationParameters::leftDistortion {} |
Distortion coefficients for the left camera.
| PinholeIntrinsics retinify::CalibrationParameters::leftIntrinsics {} |
Pinhole intrinsics for the left camera.
| DistortionCoefficients retinify::CalibrationParameters::rightDistortion {} |
Distortion coefficients for the right camera.
| PinholeIntrinsics retinify::CalibrationParameters::rightIntrinsics {} |
Pinhole intrinsics for the right camera.
| Mat3x3d retinify::CalibrationParameters::rotation {} |
Rotation matrix.
| Vec3d retinify::CalibrationParameters::translation {} |
Translation vector.