|
retinify 0.1.7
Real-Time AI Stereo Vision Library
|
|
retinify 0.1.7
Real-Time AI Stereo Vision Library
|
Retinify is an advanced AI-powered stereo vision library designed for robotics.
It enables real-time, high-precision 3D perception by leveraging GPU and NPU acceleration.
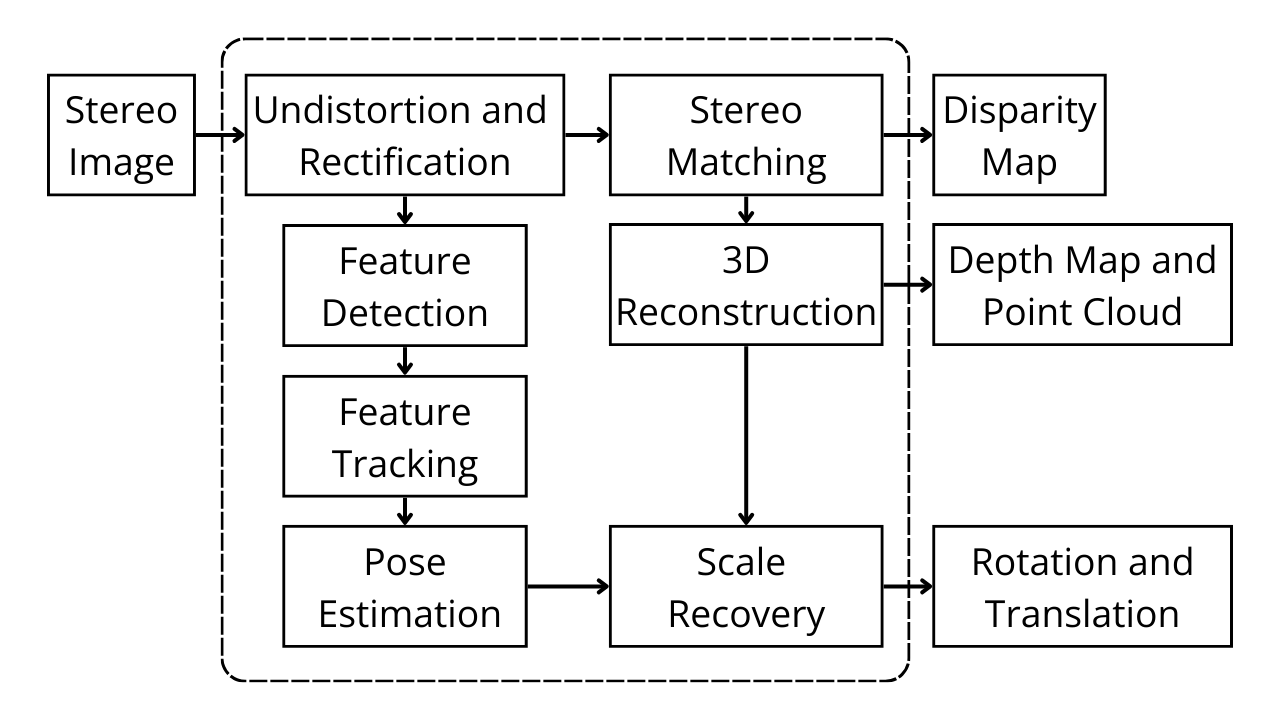 |  |
The main functionality of retinify is accessible through retinify::Pipeline.
GPU-Based Computing:
All processing required for stereo depth estimation — including image remapping (undistortion and rectification), stereo matching, and 3D reprojection — is executed entirely on the GPU, enabling efficient and real-time performance.
AI-Powered Stereo Matching:
Stereo matching is computed using deep learning–based models, delivering significantly higher accuracy and robustness compared to traditional algorithms.
Flexible Integration:
The pipeline is camera-agnostic and supports any stereo camera setup. Input images are handled via raw pointers and strides, allowing seamless integration without dependencies on specific image processing libraries.
For all inquiries, including support, collaboration, please contact:
contact@retinify.ai